我们已经能够减少仪器中的漂移和噪声到如此程度,以至于我们可以看到分子通过比自身直径还小的间距时的细微运动……[T]这些实验在15年前才实现。
——史蒂夫·勃洛克,斯坦福大学生物科学与物理应用教授
试想一下,在对计算机一无所知的情况下,我们如何去逆向设计它(“黑匣子”的方法)。首先,我们可以把周围装上磁性传感器阵列。我们会注意到,在更新数据库操作期间,重要的活动正在某一特定电路板上进行着。我们很可能会注意到,在这些操作进行时,硬盘上同样也有行动。(实际上,仔细听硬盘的转动一直是观察计算机运行的一个简单办法。)
我们可以再推论说,该磁盘与存储数据库的长期记忆有很大关联,并且在将数据转换成存储的操作中,这些电路板也在活动。这就近似地告诉我们,这些操作发生的地点和时间,但对于任务是如何完成的,并没有多大的关联。
如果计算机的寄存器(临时内存的位置)连接到前板灯(这一点与早期计算机的情况类似),我们将看到灯以某种模式在闪烁,这些显示了电脑在分析数据时寄存器状态的迅速变化,但在计算机的数据传输时,变化则相对缓慢。我们也许可以进而推论说,这些灯反映了进行分析时的逻辑状态变化。这种观点是准确的,但并未进行修饰,并不能为我们提供一个行动理论,或是类似信息实际编码以及变换一样的观点。
以上描述的假设情形在历史上已有反映,人类已经开始利用简陋工具对大脑进行扫描和建模,这些努力都起了作用。基于当代脑扫描研究的大多数模型(如利用fMRI、MEG等方法,还有一些将在接下来的内容中讨论)显示出了底层的机制。虽然这些研究有价值,但它们低下的时空分辨率不足以完成大脑逆向工程所要表现出的人类大脑的显著特点。
大脑扫描的新工具。现在设想一下,前面关于计算机的例子,我们能够真正地将精密的传感器放到电路的特定点上,而这些传感器能够以非常高的速度跟踪信号。我们现在有必要采用记录实时改变信息的工具,以便详细描述一个真正的电路工作过程。事实上,这与电气工程师究竟如何去理解和调试有关,如计算机电路板(例如逆向设计竞争对手的产品),可以使用可视化的计算机信号进行逻辑分析。
神经科学还没有使用可以进行这种分析的传感器技术,但这种情况即将改变。对等进入大脑的工具正在以指数速度发展。如图4-1所示,这种无创大脑扫描设备的分辨率大约每12个月增加一倍(每单位体积)。31
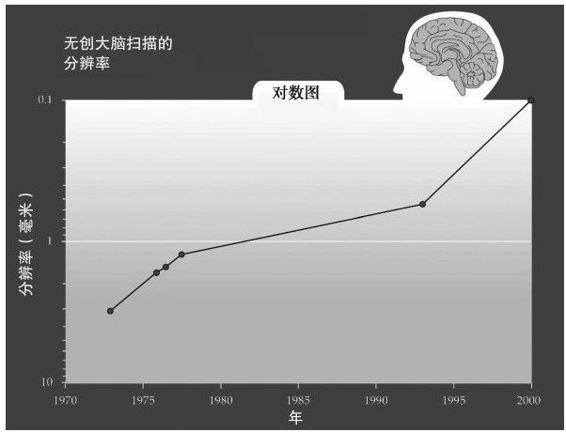
图 4-1
随着大脑扫描图像再现的速度提升,我们可以通过比较来观察这一改进(见图4-2)。
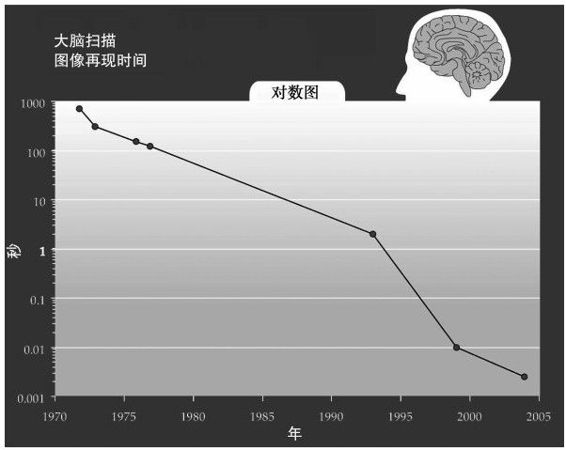
图 4-2
fMRI是最常用的大脑扫描工具,它提供了相对较高的(1~3)毫米的空间分辨率(单个神经元没有足够高的图像),但相对较低的几秒时间分辨率。当前fMRI技术提供的时间分辨约为1秒,或在扫描薄的大脑皮层时十分之一s的分辨率。
另一种常用的技术是MEG,用来测试头盖骨(主要由皮质锥体细胞构成)外侧的弱磁场,该技术具有较高的时间分辨率(1毫秒),但其空间分辨率却非常低(约1厘米)。
弗里茨·萨莫尔,红木神经科学研究所的首席研究员,正在开发fMRI和MEG相结合的方法,以便提高测量的精度。其他的最新进展表明,fMRI可以映射称为柱状和层状结构的区域,这块区域是只有1毫米宽的一小部分,检测任务也只是在几ms内进行。32
fMRI和使用正电子称为发射断层扫描(positron-emission tomography,PET)的相关扫描技术,都是通过间接的方法测量神经元活动的。PET用来测量局部脑血流量(rCBF),而tMRI测量血氧水平。33虽然血流量和神经活动的关系引起了一些争议,但还是达成了共识,它们都反映突触活动,而不是神经元的尖峰。神经活动和血流量关系的第一次明确表达是在19世纪末。34不过,tMRI有一个限制条件——突触活动之间的血流量关系不是直接的:各种代谢机制对两种现象的关系都有影响。
然而,无论PET和tMRI都是最适合测量大脑状态相对变化的可靠方法。它们的主要方法是使用“减法范式”,这种方法可以显示执行特定任务期间最活跃的区域。35此过程会删除扫描过程不理想时产生的数据,一般都是执行一个指定的精神活动而产生的数据。这些不同显示了大脑状态的变化。
“光学成像”是一种提供高时空分辨率的微创技术,其中涉及拆除部分头盖骨,在活动神经上用荧光染料对脑组织染色,然后通过影像与数码相机进行记录。由于光学成像需要手术,所以这项技术还是主要用于动物实验,特别是用白鼠实验。
经颅磁刺激(TMS)是另一种鉴定大脑不同区域具体功能的方法,它通过将一个电磁线圈精确地放置在头正上方,从头盖骨外部增加强脉冲磁场。通过模拟或引发一个大脑微小区域的“虚拟损坏”(使之暂时能力丧失),削弱或提高技能。36 TMS也可以用来学习大脑不同区域具体任务的关系,甚至可以引发脑部神经的活动。37大脑科学家艾伦·斯奈德报告说,她大约40%的测试课题都是关于TMS新技术的,其中有很多成效卓著,如绘图能力的测试。38
如果在扫描时,我们可以选择摧毁大脑,那么更高的空间分辨率将成为可能,当前扫描一个冷冻的大脑已经成为可能,虽然没有足够的速度和带宽来完整映射所有的相互连接,但当再次依据加速收益法则时,这种潜力就会呈指数增长,就像扫描大脑其他面一样。
卡耐基·梅隆大学的安德里亚斯·诺瓦特斯用一种精度为200纳米的仪器扫描小鼠的身体和大脑的神经系统,这已经接近逆向工程所要求的程度。另一种划时代意义的扫描仪是美国宾得克萨斯州A&M大学实验室开发的“脑组织扫描仪”,它能够在一个月内使用片扫描技术扫描整个小鼠。39
改进的解决方案。许多新的脑扫描技术的发展极大地改善了当前的时空分辨率。新一代传感和扫描系统提供了促进模型发展的工具,这些模型拥有前所未有的细致程度。以下是这些成像传感系统的小例子。
一个令人特别兴奋的新扫描相机正在美国宾夕法尼亚大学的神经工程实验室进行开发,领导该项目的是Leif H.Pinkel。40这部仪器的空间分辨率已经足够高,可以形象的绘制单个神经元,时间分辨率将达到1毫秒,可以记录每个神经元的放电过程。
最初的版本在高达10微米的相机深度下同时扫描100个细胞,未来的版本将在150微米深度和亚毫秒级的时间分辨率下同时扫描100个细胞。这一系统可以扫描体内(在活的大脑中)神经组织,而动物可以进行思维活动,即使大脑表面必须暴露出来。被染色的神经组织随着电压的变化产生荧光,这些都可以被高分辨率的数码相机采集到。扫描系统将用于检查动物学习特殊感知能力之前和之后的大脑。该系统结合了较高的时间分辨率(1ms),又可以形象地表示单个神经元的连接。
这些方法也已发展到无创激活神经细胞中,甚至到了在时间和空间方式上精确神经元的一个特定部分。一种直接使用“双光子”激励的方法,称为“双光子激光扫描显微镜”(TPLSM)41。这将在三维空间内创建一个单点焦点,从而实现高分辨率扫描。它利用仅仅持续10亿分之一秒(10-15秒)的激光脉冲来检测完整大脑的单一突触,检测的方法是通过激活突触感受器来测量脑细胞内钙的积累。42这种方法破坏一些微不足道的组织,但却可以获得活动中树突棘和突触超高分辨率的图像。
这项技术已经用来执行超精密的细胞内手术。物理学家埃里克·马祖尔和他在哈佛大学的同事们一起展示了执行细胞内精密修改的能力,例如切断神经元之间的连接或在不影响其他血球的情况下毁坏一个线粒体(细胞的能量来源)。“它产生太阳的热量,”马祖尔的同事唐纳德·英格伯说,“但只有10-30s,而且是在一个很小的空间内。”
另一项称为“多电极记录”的技术使用电极组来同时记录大量高时间分辨率(亚毫秒)的神经活动。43而且,一个称作二次谐波产生(SHG)显微镜的无创技术能够“学习细胞运动”,这一点是康奈尔大学的一名研究生,项目的领导人员丹尼尔·德贝克解释的。然而,另一个光学相干成影(OCI)技术使用相干光(相位相同的光波)来创建细胞簇的全息三维图像。
使用纳米机器人扫描。尽管大量从头盖骨外侧对大脑进行无创扫描的手段获得了快速发展,但要想获取每一个突出的神经元细节,最好的方法还是从内部对大脑进行扫描。到21世纪20年代纳米机器人技术将会变得可行,而进行大脑扫描会成为它的一个重要应用,先前已经描述过,纳米机器人就是人类血细胞大小(7微米~8微米)甚至更小的机器人。44数以十亿计的纳米机器人可以穿过人类的每一条脑部毛细血管,同时对所有相关的神经元特征进行扫描。采用高速无线通信技术,这些纳米机器人可以相互交流,并可以同收集大脑资料库的计算机进行交流(换句话说,纳米机器人和计算机将会处在同一个无线局域网内)。 45
连接纳米机器人与生物大脑结构的一个关键性的技术挑战是血脑屏障(blooch-brainbarrier,BBB),19世纪末,科学家们发现当他们往动物的血液中注入蓝色染料时,除了脊髓和大脑,动物的所有器官都变成了蓝色。于是,他们假想在大脑中有一层屏障,用以保护大脑不受血液中潜在的有毒物质的侵害,这些有毒物质包括细菌、激素、充当神经递质的化学物质,以及其他毒素。只有氧气、葡萄糖和某些其他的小分子团可以通过血管进入大脑。
20世纪初的实体解剖学表明,与其他器官中同样粗细的血管相比,大脑和其他神经系统中的毛细血管壁与内皮细胞结合得更为紧密。最近的研究也表明,BBB是一个十分复杂的系统,该系统中设有准许物质进入大脑的密钥,例如,我们发现两类蛋白质,分别叫做zonulin和zot,它们能够与大脑中的感受器相互作用,从而在特定区域暂时性地打开BBB。这两种蛋白质在小肠中也有着同样的工作机理,以此来帮助生物体对葡萄糖和其他营养成分进行吸收。
任何利用纳米机器人对大脑进行扫描的设计或进行其他与大脑有关的设计都得考虑BBB,考虑到我们未来的能力,在此我将提出一些可行的策略。当然,在未来的25年中,其他的策略也会发展起来。
●一个很容易想到的策略是把纳米机器人制造的足够小以使它能够通过BBB,但至少从今天的纳米技术来看,这不太实用,要想实现这个策略,纳米机器人在直径上要小于等于20纳米,这个长度是一百个碳原子的大小。把纳米机器人的大小限制到如此程度的同时,也会限制它的功能。
●一个折中的策略是让纳米机器人停留在血液中,同时给它安装一条机械臂使之能够透过BBB进入到有神经细胞生存的细胞外液,这可以使纳米机器人保持足够大小来保证它的计算和导航功能。由于几乎所有的神经元都只占据一条毛细血管(2~3个细胞宽)的宽度,机器臂只需要达到50微米,而罗伯特·弗兰茨和其他学者都分析并给出了把机器臂限制到20纳米以内的可行性。
●另一种策略是让纳米机器人停留在毛细血管中,然后使用无创扫描,例如,Finkel和他的助手设计的一套扫描系统,可以达到很高的150微米的扫描分辨率(足以看见个体之间的相互连接),这已经超出我们的需求好多倍,很显然,这种类型的光学成像设计必须足够微型化(与我们现在的设计相比),但它用到的电荷耦合器件传感器是能够支持这种微型化的。
●另一种无创扫描会涉及一组发射集中信号的纳米机器人,就像双光子扫描仪一样,另外还有一组纳米机器人来接收传输。该中介组织的拓扑结构可以通过分析对接收信号的影响来确定。
●由罗伯特·弗兰茨建议的另一条策略,它包括在BBB中打洞,从血管中退出,然后修复损害,从而在理论上支持纳米机器人穿越BBB。由于纳米机器人是由钻石结构的碳构成,所以它远比生物组织坚硬。弗兰茨写道:“要通过细胞之间丰富的组织,就需要一个改进的纳米机器人来破坏最少数量的挡在它们前面的细胞间的粘合连接,之后,为了尽量将损坏降低到最小,这些纳米机器人必须重新修复粘合连接,就像补上一颗痣一样。”46
●还有一种方法是根据当代的癌症研究提出的。癌症研究人员选择性地破坏BBB,从而将破坏癌症的物质运输到肿瘤的位置抱有很大的兴趣。对于BBB,最近的研究表明,它开创了多元响应的先河,其中包括某些蛋白质(如以上所述的那些)、局部高血压、某些物质的高浓度、微波和其他形式的辐射、感染和各种炎症等。也有一些专门的处理来传输所需的物质,如葡萄糖。也有人发现,糖甘露醇会引起内皮细胞暂时萎缩,这时就会提供临时的血脑屏障缺口。几个研究小组正在利用这些机制来研究打开BBB的化合物。47即使这些研究旨在研究癌症的治疗方法,但类似的方法也可以为纳米机器人进行大脑扫描和提高我们的心理功能打开成功之路。
●我们可以绕过血液和BBB,将纳米机器人注入大脑特定区域中,从而直接访问神经组织。正如我下面要提及的,新的神经细胞可以从脑室迁移到大脑的其他部分。纳米机器人也可以遵循相同的迁移路径。
●罗伯特·弗兰茨描述了一些为纳米机器人提供的监视感知信号的技术。48这些对于大脑逆向工程的输入,以及在神经系统内部创建全浸虚拟现实都是很重要的。
●弗兰茨提出“移动纳米器件”来扫描和监测听觉信号……(这些)进入耳朵,通过其螺旋动脉分支到达耳蜗管,然后作为螺旋神经纤维周围的神经监测器,而神经进入螺旋神经节内的哥蒂氏器官上皮。这些监视器可以进行检测、记录或为其他通信网络中的纳米器件转播所有人耳可以感知的听觉神经通信。
●对于人体的“重力感应、旋转、加速,”他设想“放在传入神经末梢的纳米监听器出自位于……半规管的毛细胞”。
●对于“动物动觉感应管理……运动神经元可以进行监测,以记录肢体的运动和位置,或特定的肌肉活动,甚至会对此施加控制。”
●“嗅觉和味觉感觉神经信息传输可能被纳米传感仪器窃听[上]。”
●“疼痛信号可能被记录或根据需要修改,就像来自皮肤感受器的机械和温度神经冲动……”
●弗兰茨指出,视网膜拥有丰富的小血管,“允许随时可以进入光感受器(杆、锥、双极神经元和神经节)以及集成……神经元。”视神经的信号代表超过每秒一亿的水平,但这种信号处理水平已经可以控制。正如麻省理工学院的托马斯·波吉奥等其他人指出,我们还不了解视神经的信号编码。一旦我们有能力来监视每个离散视神经纤维的信号,这将在很大程度上促进对于这些信号的解释。这也是目前比较火的一个研究领域。
正如我下面要讨论的,身体的原始信号,通过多层加工,方能聚集成动态调节的两个小器官,这两个器官称为左脑岛和右脑岛,它们位于大脑皮质深处。为实现全浸虚拟现实,更有效的可能是挖掘已经解释的脑岛信号,而不是遍及整个身体的未经处理的信号。
通过扫描大脑来实现逆向工程,其工作原理比实现特别属性的“上传”要容易,这一点我将在接下来的内容中进一步讨论。为了逆向设计大脑,我们只需要扫描一个区域内的连接,就足以了解它们的基本格局。而且我们并不需要捕捉它的每一个连接。
一旦了解了一个区域内的神经通路模式,我们就可以结合这些知识详细了解该区域每个神经元的工作原理。虽然大脑的特定区域可能有几十亿的神经细胞,但它也只是包含数量有限的神经类型。我们已经在很多方面获得了很大的进展,如通过体外(在测试盘)研究,获得特殊种类的神经和突触连接的机制,就像在活的机体内使用双光子扫描一样。
上述方案涉及的功能至少在当前的早期阶段已经存在。我们已经拥有的技术能够生产高清晰度的扫描仪,如果这些扫描仪在物理特性上接近于神经,那我们将可以看到特定大脑区域每一连接的精确形状。而对于纳米机器人,已经有四个主要的会议致力于发展血细胞的诊断和治疗了。49正如第2章讨论的那样,我们可以预见计算成本的指数下降和规模的迅速下降,以及电子和机械技术效率的提高。基于这些预测,我们可以保守地估计在21世纪20年代实现这些方案所必备的纳米机器人技术。一旦基于纳米机器人的扫描成为现实,我们就将最终和电路设计人员站在同一位置:能够在大脑数百万甚至数十亿的地点放置高灵敏度且高分辨率的传感器(以纳米机器人的形式),从而见证大脑活动的惊人细节。